17 июня 1997 года в 10 часов 50 минут в Лаборатории Всероссийского Научно-исследовательского института экспериментальной физики (ВНИИЭФ) Арзамас-16 при проведении работ на экспериментальной установке сборки вследствие нарушения регламентных работ создались условия для возникновения самоподдерживающейся цепной ядерной реакции (СЦР). Сотрудник ядерного центра, проводивший эксперимент, получил смертельную дозу облучения.
Из воспоминаний ликвидатора аварии – Начальника-Главного конструктора ООО «СКТБ ПР» - Александра Федоровича Батанова:
«В начале 1997 года мы завершили создание робототехнического комплекса - МРК-25 «Кузнечик». А в конце мая – начале июня 1997 года был подведен итог на лучшую концепцию по роботизации МЧС и мы, в лице МГТУ им. Н.Э. Баумана, победили. Заместитель министра МЧС – Фалеев М.И. поздравил нас и 18.06.1997 года, а Министр МЧС – Шойгу С.К. подписал указ о ее реализации.
19.06.1997 в начале первого ночи на пороге моей квартиры стоял офицер МЧС, он настоял на том, чтобы я срочно поехал с ним в 294 ЦСООР «Лидер» для демонстрации Шойгу С.К. макетного образца нашего робота МРК-25 «Кузнечик», который в это время стоял на выставке. Я понял, что «показ» будет связан с аварией в Арзамасе-16 и договорился с одним из операторов, сотрудником нашего КБ, что он выедет со мной.
МЧС забрали с выставки наш МРК, привезли на аэродром и погрузили в самолет, куда погрузили также МРК «HOBO» и «Rascal» фирмы «Kentre», Ирландия, использовавшиеся в ФСБ России. Ранее мы работали с сотрудниками этого подразделения ФСБ и хорошо их знали. Оказалось, что в Арзамасе-16 также был МРК немецкого производства «MF-4» фирмы «Telerob».
В самолете, во время полета, Министр МЧС Шойгу С.К. на мои слова, что это всего лишь макетный образец, а не серийный и даже не опытный образец, сказал: «Это Ваш дебют в МЧС».
В центре Арзамас-16 оказалось, что в помещении, где была сборка, находились ещё контейнеры с плутонием, и их надо было вытащить в первую очередь, т.к. неизвестно, что могло случиться.
Был организован сводный коллектив из специалистов Центра «Лидер» МЧС, МГТУ им. Н. Э. Баумана и ФСБ России, который и ликвидировал последствия этой аварии…»
Работы по ликвидации последствий аварии на сборке ВНИИЭФ (рис. 1) выполнялись сводной оперативной группой, состоящей из специалистов центра ВНИИЭФ, Министерства по чрезвычайным ситуациям (МЧС) России, МГТУ им. Н.Э. Баумана и Федеральной службы безопасности (ФСБ) России.
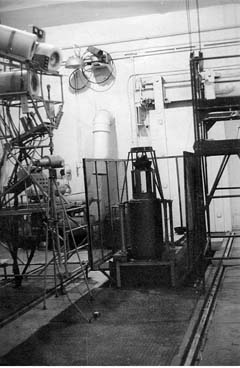
Рис. 1 Фрагмент стенда со сборкой
Для ликвидации последствий аварии в Арзамасе-16 были использованы:
- МРК МF- 4, разработка фирмы «Telerob», Германия – принадлежащий аварийно-техническому центру ВНИИЭФ и предназначенный для работ на ядерных объектах (рис. 2);
- МРК-25, ОКБ специальной Робототехники МГТУ им. Н.Э. Баумана, Россия (рис. 3);
- МРК «Hobo» и МРК «Rascal», разработка фирмы «Kentree», Ирландия, принадлежащие ФСБ России (рис.4).
 |
 |
 |
| Рис. 2 МРК МF- 4 | Рис. 3 МРК-25 | Рис. 4 МРК «Hobo» |
Последние три МРК создавались только для борьбы с терроризмом и не имели радиационной защиты блоков системы управления и телекамер.
После обсуждения задач было намечено три этапа работ:
- эвакуация контейнеров с делящимися материалами с помощью МРК-25;
- навеска на крюк дистанционно управляемого электрокрана вакуумного захвата с помощью МРК MF-4;
- снятие верхней части «сборки» с помощью вакуумного захвата и прекращение (СЦР).
Выход из строя МРК MF-4 на втором этапе и неудачная попытка снятия верхней части аварийной сборки с помощью вакуумного захвата привели к изменению первоначального плана.
Добавилось еще 3 этапа работ:
- проведение работ по эвакуации MF-4 из помещения лаборатории с помощью МРК-25;
- навешивание модернизированного блока вакуумного захвата на крюк электрокрана;
- транспортировка в помещение и установка монтажного столика в заданном месте;
- транспортировка магнитного захвата и его размещение внутри лабораторного помещения около сборки;
- снятие верхней части сборки с помощью вакуумного захвата и прекращение СЦР.
Метод прекращения нейтронной реакции специалисты ВНИИЭФ выбирали из нескольких вариантов. Ими же были изготовлены различные специальные приспособления, которые могли закрепляться на манипуляторе роботов или на крюке дистанционно управляемого электрокрана. С их помощью отрабатывались приемы снятия верхней полусферы сборки (рис. 5 а, b, с)
 a a |
 b b |
 c c |
| Рис. 5 Приспособления для снятия полусферы |
Отличительной особенностью трех последних этапов была отработка эвакуации МРК-25, в случае выхода его из строя, с помощью МРК «HOBO».
Перед выполнением последнего этапа МРК-25 и МРК «HOBO» были снаряжены как роботы-пожарные. На манипуляторах этих роботов закреплялись пожарные стволы для тушения пожара углекислым газом (рис. 6 и 7). МРК-25 располагался у одних дверей помещения лаборатории, МРК «HOBO» у других с противоположной стороны.
 |
 |
| Рис. 6 Установка пожарных стволов на МРК-25 | Рис. 7 Установка пожарных стволов на МРК «HOBO» |
Практически все операции были выполнены с помощью МРК-25.
Для выполнения работ с помощью МРК необходимы следующие подготовительные мероприятия:
1. Изучение места работы по схемам, фотографиям, материалам видеосъемок, визуально с помощью перископа.
2. Визуализация места выполняемых работ для операторов с помощью дополнительно установленных телекамер.
3. Отработка всех операций в помещении, похожем на то, в котором находилась сборка.
4. Защита мобильных роботов от нейтронного излучения.
5. Отработка тактики движения мобота.
Остановлюсь на этом несколько подробнее.
Изучение места работы позволило уточнить пути движения МРК, место расположения пяти контейнеров, «сборки», высоту порогов, перепад высоты полов, расположение кабелей, шлангов, приспособлений, место размещения эвакуируемых контейнеров и т.д., увереннее чувствовать себя операторам МРК.
Визуализация места работы.
Опыт Чернобыля показал, что для уверенного управления МР необходимо непрерывная текущая информация о месте работы с нескольких ракурсов. Для непрерывного контроля местоположения перемещающегося робота в помещении и удобства работы оператора только телекамер, установленных на самом МР, недостаточно. Поэтому была продумана и реализована система размещения дополнительных выносных телекамер. К сожалению, радиационно-стойких телекамер, которые можно было бы установить внутрь помещения, где находилась аварийная сборка, не было, а обычная телекамера на ПЗС матрице, с помощью которой проводилась съемка с уровня входных дверей в помещение, вышла из строя через пятнадцать минут после начала съемки. Были применены дополнительные телекамеры от «Hobo», «Rascal» и MF-4. Одна из телекамер была присоединена к перископу, по которому из помещения, в котором находился пост оператора, можно было наблюдать за всем, что происходило в лабораторном помещении, где и размещалась сборка. Вторая устанавливалась на поворотном устройстве и размещалась в соседнем с лабораторией помещении. Она позволяла видеть то, что происходит в помещении лаборатории и в створе прохода между этими двумя помещениями. Управляли поворотной телекамерой и перископом специально выделенные сотрудники по команде оператора МРК или руководителя работ.
Защита МРК.
МРК «Hobo» и МРК- 25 предназначались для работ в составе сил безопасности, на них установлены обычные телекамеры и незащищенная система управления. Поэтому мы попросили сотрудников ВНИИЭФ привезти материалы, предназначенные для защиты от нейтронного излучения, и с помощью этих материалов создали защиту на МРК-25 (рис. 8), а затем аналогичным образом была выполнена защита на MF-4 (рис. 9) и «Hobo» (рис. 10). Была использована полиэтиленовая крошка, кадмированная полипропиленовая крошка и пластины из этих материалов для защиты блоков системы управления. Пластинами из этих материалов и парафином с крошкой были защищены телекамеры. Опыт их применения оказался удачным, через 8 минут после начала работы МРК-25 в помещении со сборкой на экране монитора появилось небольшое число мелких белых точек, их количество и яркость не увеличивались на протяжении выполнения всех операций.
 |
 |
 |
| Рис. 8 Установка защиты на МРК-25 | Рис. 9 Установка защиты на MF-4 | Рис. 10 Установка защиты на HOBO |
Отработка всех операций, выполняемых МРК.
Все операции первоначально детально отрабатывались в похожем помещении с возможными вариантами их выполнения. Например, операция по вывозу контейнера отрабатывалась в 3-х вариантах:
1-й вариант - захват контейнера манипулятором, подъем и эвакуация на весу к месту установки;
2-й вариант - захват контейнера манипулятором, подъем и установка контейнера на верхнюю плиту робота и эвакуация к месту установки;
3-й вариант - захват ручки контейнера с помощью манипулятора с крюком, закрепленным на коротком тросе к корпусу МРК-25 и эвакуация контейнера волоком к месту их установки. На рис. 11 показан момент отработки снятия со стенда кольца с помощью магнитов подносимых манипулятором «HOBO». На рис. 12 демонстрируется отработка операции по навеске вакуумного захвата на крюк электрокрана с помощью МРК-25.
 |
 |
| Рис. 11 Снятие со стенда кольца | Рис. 12 Навеска вакуумного захвата |
Отработка тактики движения мобота.
Основная задача – сократить время пребывания МР в зоне действия радиации, стараясь двигаться с минимальным количеством разворотов робота, т.к. нос, корма и верхняя плита были наиболее защищенными частями. Телекамеры были защищены оболочками с козырьками, чтобы при разворотах телекамер нейтронный поток не попадал бы прямо в объектив. Манипулятор разворачивался в рабочее положение уже в зоне биологической защиты, телекамеры также устанавливались таким образом, чтобы две смотрели вперед на зону работы и движения, а одна назад для движения задним ходом без разворота телекамер. Движение МР осуществлялось только передним и задним ходом с максимально возможной скоростью. Кабели и шланги укладывались по определенной, заранее отработанной схеме.
Операция по эвакуации контейнеров хронометрировалась. Общее время всех работ 23 минуты, чистое время эвакуации пяти контейнеров 11 минут 47 сек.
Операция по накидыванию карабинов и крюков на эвакуируемый MF-4 длилась 4 минуты 40 секунд.
Все полное время на выполнение работ 13 мин. 53 сек.
Время на крепление вакуумного захвата на крюке электрокрана, перевозку и установку столика и магнитного захвата составило 14 мин. 30 сек.
Воздействие радиации на МРК и дезактивация мобильных роботов
Перед выполнением работ в помещении, где находилась «сборка» на МРК в определенных местах устанавливались дозиметрические датчики.
После эвакуации контейнеров и выхода МРК-25 из помещения, в котором находилась аварийная сборка датчики снимались и измерялись полученные дозы, а мобильный робот подвергался дозиметрическому контролю с помощью ручных приборов. Измерялась наведенная гамма радиация по обычной методике на расстоянии 0,1 метра от замеряемой поверхности.
Анализ мазков, взятых с корпусных деталей МРК-25 с помощью тампонов, показал отсутствие фракций аэрозолей. После дозиметрического контроля МРК-25 промывали слабыми щелочными растворами.