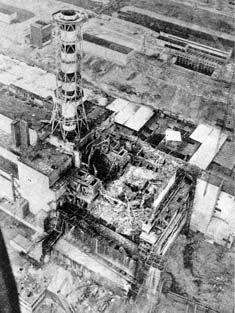
Важнейшим событием в развитии нашей организации явилось выполнение государственного заказа по созданию дистанционно-управляемых комплексов для работы в 1986-1987 годах на Чернобыльской АЭС. Это была наша первая работа в области атомной энергетики.
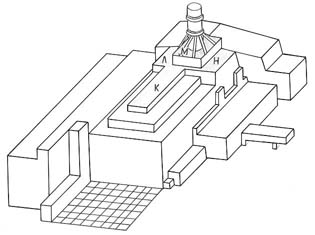
Местом работы роботов решением Правительственной комиссии была определена крыша 3-го энергоблока, зоны «Н» и «М» (рис. 2). «Мобот Ч-ХВ» работал на ЧАЭС с конца августа и до середины сентября 1986 г. Два комплекса «Мобот Ч-ХВ-2» работали с января по апрель и один с июня по август 1987 года.
|
Рис. 1 Разрушенный 4-й энергоблок ЧАЭС |
Рис. 2 Зоны работы МРК |
Работы на кровле проводили также следующие роботы других производителей: «СТР», «Белоярец», «MF-2», «MF-3», двадцать три робота «ЦНИИ РТК».
Два образца «СТР» были выполнены на базе макетного образца марсохода и выполнили большой объем работ по очистке кровли. Недостатком СТБ было то, что аккумуляторные батареи из-за ионизации воздуха разряжались на 30% времени быстрее, а заряжались на 1,5…2 часа дольше запланированного времени. Радиоканал в некоторых местах сбоил и оператору приходилось с пультом в руках подходить к роботу на короткое расстояние.
«MF-2» - проработал несколько часов, после чего электроника вышла из строя.
«MF-3» - из-за неудачной компоновки поста управления и короткого по длине кабеля управления (100м), оператору для управления роботом необходимо было бы работать при высоких уровнях радиации, поэтому нельзя было использовать все функциональные возможности данного комплекса.
«Белоярец» - в силу конструктивных особенностей авиационного трапа, на базе которого был изготовлен данный комплекс, была очень ограничена его проходимость.
Роботы ЦНИИ РТК – было доставлено в Чернобыль 23 образца роботов (4 - разведчика, 17 – подборщиков (15 колесных и 2 гусеничных), 2 - спасателя, 2 тяжелых робота на базе бульдозеров для сбора соли.
«…Непонимание задач привело к рождению большого количества типов роботов при их недостаточно продуманном конструктивном решении и низкой эксплуатационной надежности…» (из доклада Зам.начальника Хим. Войск МО СССР генерал-майору Кунцевичу А.Д.)
По заданию начальника Химических войск МО СССР - генерал-полковника Пикалова В.К. в МВТУ им. Н.Э. Баумана были разработаны дистанционно управляемые комплексы «Мобот-Ч-ХВ» и в дальнейшем «Мобот-Ч-ХВ-2».
Для уточнения технических характеристик предполагаемых МРК на ЧАЭС в начале июня выехали специалисты МВТУ. По результатам поездки были сформулированы требования к создаваемым комплексам, что позволило технически грамотно разработать МРК для очистки от продуктов взрыва кровли 3-его энергоблока.
В МВТУ им. Н.Э. Баумана сводным коллективом двух факультетов («Специальное машиностроение» и «Конструкторско-механический») в кратчайшие сроки (10.06.1986г. – 18.08.1986г.) был разработан робот «Мобот-Ч-ХВ».
Название робота означает: «Мобот» – мобильный робот, «Ч» — Чернобыль, «ХВ» – химические войска.
Всего в группу сотрудников МВТУ им. Н.Э. Баумана участвовавших в создании «Мобот-ЧХВ» и «Мобот-ЧХВ-2» и участвовавших в экспедициях по применению роботов при уборке крыши 3-его энергоблока ЧАЭС входило около 60 человек. (Факультеты МВТУ: «М», «К» и «Экспериментальный опытный завод МВТУ», 5 предприятий прикрепленных для изготовления деталей и узлов МРК)
Научным руководителем работ являлся - Директор НИИСМ МВТУ им. Н.Э. Баумана, д.т.н., проф. Лакота Н.А. Техническим руководителем работ являлся ведущий инженер – Батанов А.Ф. (В настоящее время – Начальник - главный конструктор «Специального конструкторско-технологического бюро прикладной робототехники»).
В состав комплекса входил мобильный робот (МР) (рис. 3), пост оператора (рис. 4), кабельная линия связи и подачи энергии на борт МР, транспортно-посадочный модуль (рис. 5).
 |
 |
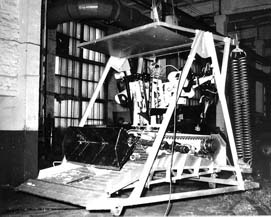 |
| Рис. 3 Мобильный робот | Рис. 4 Пост оператора | Рис. 5 Транспортно-посадочный модуль |
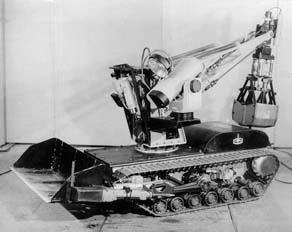
Мобильный робот (рис. 6), на котором все привода выполнены электромеханическими, состоит из:
- шасси с гусеницами, собранными из полиуретановых траков;
- кабелеукладчика, установленного внутри корпуса, сматывающего и наматывающего кабель длиной 200м (и дополнительно кабель вставка 200м – всего 400м) в полуавтоматическом режиме;
- манипулятора с грейферным захватом, использовавшимся как для взятия отдельных фрагментов, так и сыпучих материалов;
- фронтального погрузчика с двумя степенями подвижности, способного сгребать, поднимать и ссыпать груз в контейнеры;
- системы управления на релейных элементах;
- информационной системы из двух телекамер.
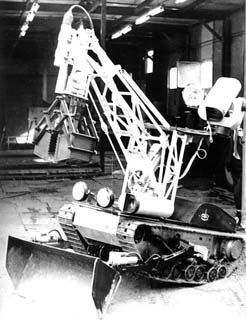
Рис. 6 «Мобот Ч-ХВ»
| №№ п.п. |
Задачи | Место проведения и перечень выполненных работ (операций) | Перечень оборудования, используемого при выполнении задач | Основные результаты |
| 1 | Доставка МР в зону работы | Крыша 3-го блока ЧАЭС, зона «Н”, установлен вертолетом | Транспортно-посадочный модуль, вертолет | Установка на крышу зоны «Н» без повреждений МР |
| 2 | Ведение дозиметрической разведки | Зона «Н», челночные движения МР по крыше | дозиметр ИМД-21 |
Дозиметрическая карта зоны работы |
| 3 | Очистка кровли | Зона «Н». Подбор радиоактивных кусков и мусора ковшом, манипулятором, транспортировка и сброс в развал 4-го блока | Аппарель, фронтальный погрузчик, манипулятор, дозиметр ИМД-21 | Сброшено в 4-й блок 2,2 тонны радиоактивных продуктов очищено 150 м2 крыши. Радиационный фон понижен в 2...3 раза. Очистка кровли до 15.09.86 г |
Таблица 1. Основные виды работ, выполненные с помощью «Мобот Ч-ХВ»
в период с 31.08.86 г. по 14.09.86 г.
Необходимо отметить, что была предложена и отработана методика дозиметрического обмера и дезактивации «Мобот-Ч-ХВ», которыми пользовались в процессе всего времени применения «Моботов».
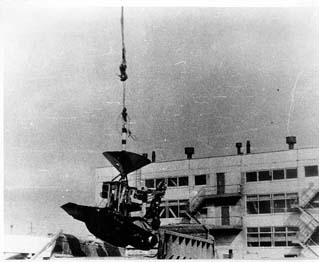
15 сентября при переносе вертолетом робота «Мобот-Ч-ХВ» с крыши на крышу сработал электрозамок и «Мобот-Ч-ХВ» разбился.
Результаты применения «Мобот Ч-ХВ» по уборке с крыши 3-го блока радиоактивных обломков и мусора от разрушенного 4-го блока оказались успешными (табл. 1). Поэтому Правительственная комиссия поручила МВТУ им. Н.Э. Баумана срочно изготовить еще два комплекса «Мобот Ч-ХВ» для завершения работ на крыше 3-го энергоблока и в машинном зале.
Разработчики с учетом опыта эксплуатации «Мобот Ч-ХВ» существенно модернизировали комплекс и расширили выполняемые им функции:
- оснастили манипулятор сменным двупалым схватом;
- оснастили отбойным молотком, устанавливаемым вместо схвата или на фронтальном погрузчике;
- оснастили полуавтоматическим стыковочным устройством для снятия и установки МР на кровлю 3-го энергоблока (рис. 7);
- для увеличения силы тяги увеличили массу МР;
- увеличили грузоподъемность и зону обслуживания манипулятора и фронтального погрузчика;
- изменили конструкцию кабелеукладчика и место выхода кабеля из корпуса МР;
- усовершенствовали и дополнили систему управления, ввели систему акустической связи;
- доработали пост управления.
Модернизированный комплекс получил название «Мобот Ч-ХВ-2» (рис. 8).
 |
 |
 |
| Рис. 7 Полуавтоматическое стыковочное устройство |
Рис. 8 «Мобот Ч-ХВ-2» | Рис. 9 Два «Мобот Ч-ХВ-2» |
Двумя комплексами «Мобот Ч-ХВ-2» (рис. 9)был проделан большой объем работ и в том числе ряд уникальных операций, выполнение которых оказалось возможным только с помощью этих МРК (Табл. 2).
| №№ п.п. |
Задачи | Место проведения и перечень выполненных работ (операций) | Перечень оборудования, используемого при выполнении задач | Основные результаты |
| 1 | Доставка к месту работы МР (2шт.) | Крыша 3-го энергоблока Зоны “Н”, “ “, “M”, установка краном. | Полуавтоматическое сцепное устройство МР, подъемный кран «Демаг» | Установка МР на крышу и снятие с крыши (20 раз) |
| 2 | Дозиметрическая разведка крыши | Зоны «Н», «М». Челночные движения МР по крышам | Дозиметр ИМД-21 |
Дозиметрические карты крыши зон «Н» и «М» |
| 3 | Уборка снега с крыши, подготовка площадки для сбора радиоактивных обломков | Зоны «Н», «М». Уборка, транспортировка, сброс снега | Контейнеры. Фронтальный погрузчик | Совместная работа 2-х МР. Крыша от снега очищена |
| 4 | Контрольная дозиметрическая разведка | Зона «М» | Дозиметр ИМД-21 |
Дозиметрическая кар та, высокая мощность излучения из-под противопожарной трубы |
| 5 | Уборка и контейнирование оставшихся на крыше радиоактивных обломков | Зона «М». Дробление графитовых блоков и бетонных обломков отбойным молотком. Очистка поверхности, транспортировка, погрузка | Фронтальный погрузчик, манипулятор, дозиметр ИДМ-21, отбойный молоток, контейнеры | Совместная работа2-х МР. Крыша зоны «М» подготовлена к бетонированию |
| 6 | Эвакуация поврежденного МР из-под трубы в зоне «М» | Зона «М». Фиксация специального устройства на кромке крыши. Эвакуация поврежденного МР с помощью специального устройства, подъемного крана «Демаг», действующего робота и полуавтоматического сцепного устройства | Специальное устройство для эвакуации МР; трос с крюком и петлей; кран «Демаг»; крюк, действующий МР; полуавтоматическое сцепное устройство | Поврежденный МР эвакуирован без выхода ликвидаторов на крышу |
| 7 | Демонтаж противопожарной трубы и уборка кусков разрезанных труб, очистка освободившихся участков крыши от высокорадиоактивных обломков | Зона «М». Установка удлиненных кумулятивных зарядов (УКЗ) мобильным роботом на трубу, установка контактного замыкателя на пластину УКЗ МР; резка пожарной трубы взрывом; уборка отрезков труб, радиоактивных обломков и мусора | Специальное устройство с УКЗ; контактный замыкатель, кассета для УКЗ, МР, подъемный кран «Демаг», контейнер | Впервые в мировой практике взрывной резки все операции были выполнены с помощью МР. Пожарная труба разрезана на 7 частей. Время работы МР по взрывной резке трубы 7 часов. Убраны разрезанные куски пожарной трубы, высоко радиоактивные обломки и мусор |
| 8 | Возведение опалубки по периметру крыши зоны “М” | Зона «М». Доставка контейнеров с мешками с песком на крышу. Выгрузка из контейнера и установка мешков с песком по периметру с помощью МР. | Контейнеры, мешки с песком весом 60...80 кг. Подъемный кран «Демаг», МР | Опалубка из 350 мешков установлена по периметру крыши |
| 9 | Размещение маяков в заданных точках крыши для определения высоты уровня заливаемого на кровлю бетона | Зона «М». Доставка контейнера с маяками на крышу. Разгрузка и размещение маяков по крыше. Установка в заданных точках. | Контейнер, маяки, подъемный кран «Демаг», МР | Установлено 8 маяков |
| 10 | Эвакуация МР с крыши | Зона «М» | Кран «Демаг», полуавтоматическое сцепное устройство | МР снят с крыши и перевезен на площадку |
| 11 | Дезактивации двух МР | Территория ЧАЭС. Дезактивационный зал ЧАЭС | Ванна, автомобильная дезактивационная установка, щетки с удлиненными рукоятками, автокран, дозиметр ДП-5 | МР – дезактивированы |
| 12 | Ремонт МР | г. Припять, завод «Юпитер» | запасные блоки, узлы, инструмент | Один МР отремонтирован |
Таблица 2. Основные виды работ, выполненные с помощью «Мобот Ч-ХВ-2»
в период с 8.01.87 г. по 14.04.87 г.
Рассмотрим наиболее уникальные из операций, приведенных в таблице 2.
В результате несогласованных действий различного персонала в зоне работы «Мобот-Ч-ХВ-2» на кабель одного из МРК, при его работе на кровле, была поставлена бетонная плита, что привело к выходу робота из строя.
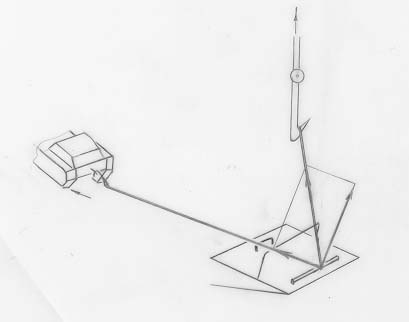
Впервые в мировой практике МРК эвакуировали с кровли с помощью дистанционно управляемого крана «Демаг» и второго робота «Мобот Ч-ХВ-2». Схема эвакуации представлена на рисунках 10, 11 и 12.
Все застрявшие роботы других типов вытаскивались только вручную с помощью ликвидаторов. Приспособление (рис. 10), в течение двух дней было разработано специалистами МГТУ и изготовлено в местных мастерских. С помощью подъемного крана «Демаг» оно поднималось на высоту крыши и затем надвигалось на карниз крыши при непрерывном контроле по телекамерам работающего робота. Надвигающееся на карниз приспособление действующий робот взял манипулятором за переднюю скобу и тянул за собой, двигаясь по крыше, помогая надвинуть приспособление. После фиксированной установки приспособления на карниз, действующий МР взял манипулятором за крюк свернутый и уложенный на приспособление трос и потащил его в сторону поврежденного робота, и после нескольких попыток вставил крюк в его буксирное кольцо. Затем подъемный кран «Демаг» специальным подвесным крюком подхватил свисающую петлю второго конца этого троса и, подтягивая трос вверх и внутрь, в сторону крыши, одновременно вытаскивал эвакуируемый робот, и надвигал приспособление на карниз крыши, поджимая к нижней его кромке раму приспособления (рис. 11).
Работающий робот, подъезжал к эвакуируемому и фронтальным погрузчиком поправлял траекторию его движения.
Эвакуируемый МР был выведен на край крыши и снят оттуда с помощью полуавтоматического сцепного устройства (рис. 12). Совместные работы операторов крана «Демаг» и работающего робота координировались по радиопереговорному устройству.
 |
 |
 |
| Рис. 10 Приспособление | Рис. 11 Схема эвакуации робота | Рис. 12 Операция снятия МР с помощью полуавтоматического сцепного устройства краном «Демаг» |
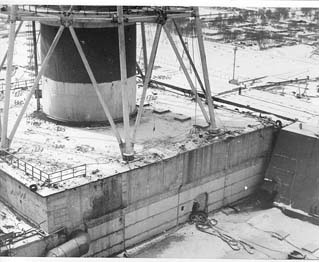
В процессе работ, по очистке крыши, возникла необходимость демонтажа стальной трубы длиной 30 м с отводом 3 м и угловым спуском длиной около 7 м, диаметром 108 мм, под которой находились высокоактивные источники излучения до 10000 Р (рис. 13). Для демонтажа трубы была применена технология резки металла взрывом с помощью удлиненных кумулятивных зарядов (УКЗ). Специалисты одного из институтов Академии наук УССР под руководством академика Паттона разработали метод взрывной шнуровой резки с помощью удлиненных кумулятивных зарядов. Специалистами МВТУ была разработана конструкция специального захвата и технология применения УКЗ с помощью робота, которая и была реализована. УКЗ был уложен в устройство, выполненное по форме в виде клещевого зажима (рис. 14), связанного проводами с контактной пластиной и отдельного контактного замыкателя взрывной электромагистрали многоразового использования (рис. 15).
 |
 |
 |
| Рис. 13 Фрагмент пожарной трубы | Рис. 14 Клещевой зажим с контактной пластиной | Рис. 15 Контактный замыкатель |
С помощью телекамер робота была осмотрена труба, выбраны места ее разделения с учетом длины, конфигурации и удобства транспортировки МР ее обрезков. Затем робот манипулятором извлекал зажим с УКЗ из специальной кассеты (рис. 16), транспортировал и устанавливал ее на трубу на месте, подлежащем резке (рис. 17). К этому же месту робот доставлял кабель взрывной электромагистрали и ставил электроконтактный замыкатель на контактную пластину УКЗ. После проверки оператором наличия контакта во взрывной линии МР отводился на безопасное расстояние и проводился подрыв (рис. 18). Наблюдение за результатами взрывной резки проводилось по телекамерам МРК. Шестью доставленными на крышу зажимами с УКЗ, труба была разделена на семь частей. Затем части труб были собраны и размещены на поддоне, а находящийся под трубой высокорадиоактивный мусор с помощью фронтального погрузчика и манипулятора был собран в контейнеры.
 |
 |
 |
| Рис. 16 Кассета с клещевыми зажимами с УКЗ | Рис. 17 Установка клещевого зажима на пожарную трубу | Рис. 18 Разрез трубы взрывом УКЗ |
Правительственная комиссия приняла решение закрыть крышу (зона «М») слоем бетона толщиной в 1 м. Для заливки такого слоя необходимо было соорудить опалубку используя безлюдную технологию. Специалисты МГТУ им. Н.Э. Баумана предложили применить в качестве опалубки мешки с песком, уложив их по периметру крыши.
Мешки на крышу подавались на поддонах. Затем они разгружались, транспортировались с помощью МР по периметру крыши и укладывались один на один в 2 ряда с тем, чтобы получить необходимую высоту опалубки. МР транспортировал по три мешка с песком, два из которых укладывались во фронтальный погрузчик манипулятором, а один на корму МР. При перевозке он удерживался схватом манипулятора (рис. 19). Вес мешков с песком составлял 60…80 кг. Таким образом, МР одновременно перевозил от 190 до 240 кг. Всего было перевезено 350 мешков (рис. 20). Для определения толщины и равномерности заливаемого на крышу слоя бетона по площади крыши с помощью МР было установлено восемь маяков (рис. 21 и 22).
 |
 |
 |
 |
| Рис. 19 Размещение мешков на роботе при перевозке | Рис. 20 Сооружение опалубки | Рис. 21 Установка маяка 1-го типа | Рис. 22 Установка маяка 2-го типа |
Необходимо отметить, что каждая из операций, выполняемых на кровле первоначально тщательно отрабатывалась внизу в условиях, близких к реальным. После отработки МР устанавливался на кровлю с необходимыми приспособлениями и дополнительным оборудованием.
По существу, с помощью роботов, впервые удалось выполнить весь перечень подготовительных работ перед бетонированием кровли без выхода на нее людей.
За период с 07.01.87 по 14.04.87 г. МРК «Мобот Ч-ХВ-2» наработали соответственно: №1 – 716 часов; №2 – 392 часа.
Снятые с крыши 3-го энергоблока роботы были подвергнуты дозиметрическому контролю и подвергнуты тщательной дезактивации. Для этого на специальной площадке МР подвешивались на крюке автокрана, с помощью полуавтоматического устройства, над специально сваренным контейнером-ванной. Дезактивация проводилась с помощью автомобильной дезактивационной установки и щеток с удлиненными рукоятками.
Дозиметрический контроль после дезактивации показал, что необходимо провести дополнительную дезактивацию. Она проводилась в специальном помещении с дезактивационной паровой установкой. Дезактивация проводилась одновременно с тщательной протиркой щетками.
После дезактивации роботы были отправлены для проведения ремонтно-восстановительных работ на ремонтную базу завода «Юпитер» г. Припять. По результатам экспертной оценки состояния 2-х МР было принято решение из узлов двух роботов собрать один. После сборки и наладки отремонтированный Мобот Ч-ХВ-2 был передан в эксплуатацию. Летом 1997 года отремонтированный МРК «Мобот Ч-ХВ-2» (рис. 23) провел дозиметрическую разведку в машинном зале 3-го и 4-го энергоблоков.

Рис. 23
По результатам этого обследования был определен объем работ по очистке помещения машинного зала. В этих работах активно использовался «Мобот Ч-ХВ-2». С его помощью производилась уборка и вывоз радиоактивного мусора из помещения.
Правительство высоко оценила выполненные работы, что отразилось в итоговом акте.
Из акта о результатах работы экспериментальных образцов телеуправляемых мобильных роботов «Мобот-Ч-ХВ-2» на крыше «М» 3-го энергоблока ЧАЭС от 13 апреля 1987 года (акт утвержден Заместителем председателя правительственной комиссии Ю.К. Семеновым:
«…Данные работы проводились в период с 7 января по 10 апреля 1987 года. В результате уборки площадей кровли уровень фона по гамма-излучению уменьшался в 3-5 раза. Весь объем работ был выполнен без привлечения на вспомогательные операции личного состава, что полностью исключило необходимость вывода человека в зону с повышенной радиацией.
Выполнение указанного объема работ роботизированными комплексами «МОБОТ» позволило согласно проведенным расчетам исключить 800 человеко-выходов на крышу «М» 3-его энергоблока с получением предельно допустимых доз облучения для личного состава.
Из всех имеющихся в наличии робототехнических средств для работы на кровле «МОБОТ» МВТУ им. Н.Э.Баумана является наиболее совершенной системой и может быть использован как прототип для дальнейшей разработки подобных телеуправляемых роботизированных систем…»